
![]()

Das KISS FC Handbuch
GUI-Installation
Das KISS GUI steht für fast alle Systeme auf der KISS-Downloadseite bereit.
… als Google Chrome Erweiterung

App hinzufügen

App starten

… als Standalone für Mac und Windows

… als Android-App

zum Download der Android App
Installation:
- .apk herunterladen
- Installation von unbekannten Quellen akzeptieren
- installieren
Startbildschirm
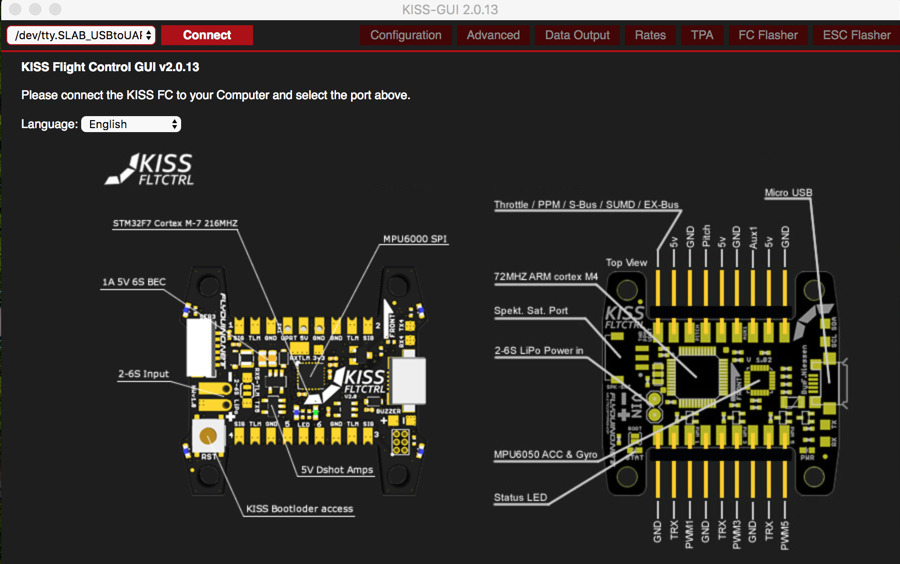
Dieses ist der Startbildschirm der auf allen Geräten gleich aussieht. In der Mitte findest du eine Darstellung beider Seiten des KISS FC und wie man die einzelnen Komponenten daran anzuschließen hat.
Tab: Configuration
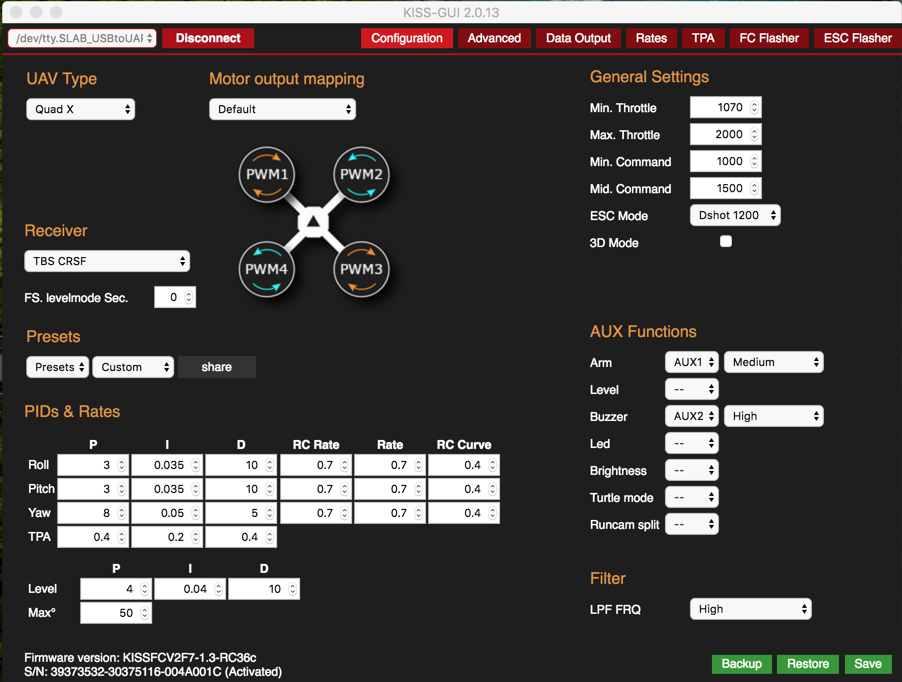
 Sobald du deinen KISS FC per USB angeschlossen hast, erscheint in dem Dropdown-Menü ein neuer Com-Port. Hier musst du den korrekten Port auswählen
Sobald du deinen KISS FC per USB angeschlossen hast, erscheint in dem Dropdown-Menü ein neuer Com-Port. Hier musst du den korrekten Port auswählen
 Hier findest du weitere Reiter, die ich nachfolgend erklären werde
Hier findest du weitere Reiter, die ich nachfolgend erklären werde
 Nach folgendem Schema musst du die Motoren am KISS FC anlöten
Nach folgendem Schema musst du die Motoren am KISS FC anlöten
 Hier findest du deine aktuelle Firmware Version und Seriennummer und ob dein KISS FC aktiviert ist, oder nicht
Hier findest du deine aktuelle Firmware Version und Seriennummer und ob dein KISS FC aktiviert ist, oder nicht
 Backup: Ein Backup aller Einstellungen als Datei anlegen, Restore: Einstellungen aus Datei wiederherstellen Save Settings: Änderungen der Einstellungen speichern
Backup: Ein Backup aller Einstellungen als Datei anlegen, Restore: Einstellungen aus Datei wiederherstellen Save Settings: Änderungen der Einstellungen speichern
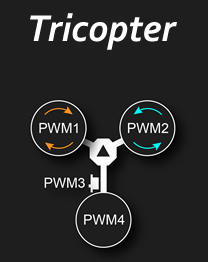
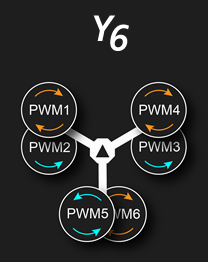
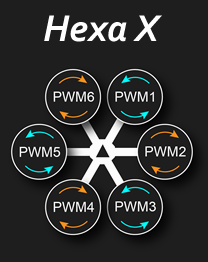
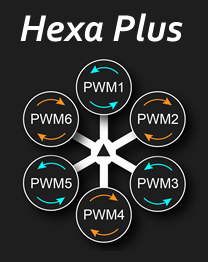
UAV Type
In diesem Menü legst du fest, welchen Typ von Copter du fliegen möchtest. Standard ist: Quad X
Achte bei der Montage der Motoren auf die Drehrichtung und den korrekten PWM-Ausgang. Außerdem ist darauf zu achten, dass die Flugsteuerung mit dem Flug-Richtungspfeil korrekt ausgerichtet ist. Einen Anschlussplan findest du hier: KISS FC – Anschlussplan


Receiver
Je nachdem, was für einen Empfänger du nutzt, kannst du in diesem Dropdown-Menü den passenden auswählen. PPM-Kanal-Reihenfolge findest du in allen Kombinationen. Ein Crossfire MicroRx muss übrigens als PPM oder Futaba konfiguriert werden.
- 4–6 single Channel
- PPM: Thr, Roll, Pitch, Yaw
- PPM: Pitch, Thr., Roll, Yaw
- PPM: Thr, Pitch, Yaw, Roll
- PPM: Roll, Pitch, Yaw, Thr.
- PPM: Pitch, Roll, Thr., Yaw
- PPM: Roll, Pitch, Thr., Yaw
- Spekt Sat DSM2
- Spekt Sat DSMX
- FrSky S-BUS
- FrSky S-BUS (not inverted = nicht invertiert)
- Gr. SUMD
- Jeti Ex Bus
- Futaba S-Bus
- Multiplex SRXL
PID & Rates
Hier kannst du wie gewohnt deine PIDs und Rates einstellen. Es gibt noch einen extra Reiter für Rates. Egal in welchen der zwei Menüs du die Rates änderst, sie sind an beiden Stellen gleich.
Presents
Flyduino hat eine Online Datenbank für User-PIDs erstellt. Über diese Datenbank kann jeder Nutzer seine PIDs mit der Community teilen und ggf. PIDs aus der Community direkt in den KISS FC laden.
General Settings
Min Throttle
minimaler Throttlewert für die Motoren
Max Throttle
maximaler Throttlewert für die Motoren
Min Command
der Throttlewert ab dem der PID Controller anfängt zu arbeiten
Mid Command
ESC Throttlewert für das Umschalten der Drehrichtung im 3D-Mode
ESC Mode
ESC Signal Protokoll auswählen: Oneshot42, Oneshot125, PWM, (Dshot150, Dshot300, Dshot600 falls ESCs dies unterstützten)
3D Mode
ist hier ein Hacken gesetzt, ist der 3D-Modus aktiviert, für diesen du natürlich noch spezielle 3D-ESCs benötigst
ESCs kalibrieren
KISS24 ESCs müssen nicht kalibriert werden.
Diesen Prozess immer ohne Propeller durchführen!
- der Zustand „Disarmed“ ist beim KISS FC immer 1000
- FC mit PC verbinden und „Min Throttle“ auf 2000 setzen
- Arme den KISS FC mit deiner Funke, aber ohne LiPo
- jetzt den LiPo anschließen (Piepton ertönt)
- Disarm (Piepton ertönt)
- LiPo-Verbindung trennen (Piepton ertönt)
- „Min Throttle“ auf gewünschten Wert einstellen (z.B. 1070)
Airmode
Um Airmode zu aktivieren: „Min Command“ auf 1000 stellen und Arming mit einem AUX-Kanal
AUX Functions
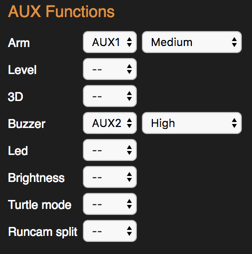
Hier kannst du bis zu vier AUX-Kanäle konfigurieren.
Es stehen folgende Ausweichmöglichkeiten zur Verfügung
- ARM – Arm/Disarm „Scharfstellen“
- Level – Angle/Level-Mode aktivieren
- 3D – 3D-Mode aktiviert
- Buzzer – Buzzer/„Sirene“ aktivieren (falls du zum Beispiel deinen Quad im hohen Gras suchst)
- LED – LED EIN/AUS/FARBE
Jeder der oben aufgeführten Ausweichmöglichkeiten kann ein AUX-Kanal zugewiesen werden sowie ein Wert:
- Low + Medium (in der Nähe von 1000–1500)
- Medium (in der Nähe von 1500)
- Medium + High (in der Nähe von 1500–2000)
- High (in der Nähe von 2000)
- Knob (nur bei LED)
Filter
LPF FRQ: Low Pass Filter / Tiefpassfilter gegen Oszillationen einstellen
- Off
- High (geringste Filterung)
- Medium High
- Medium
- Medium Low
- Low
- Very Low (höchste Filterung)
Advanced
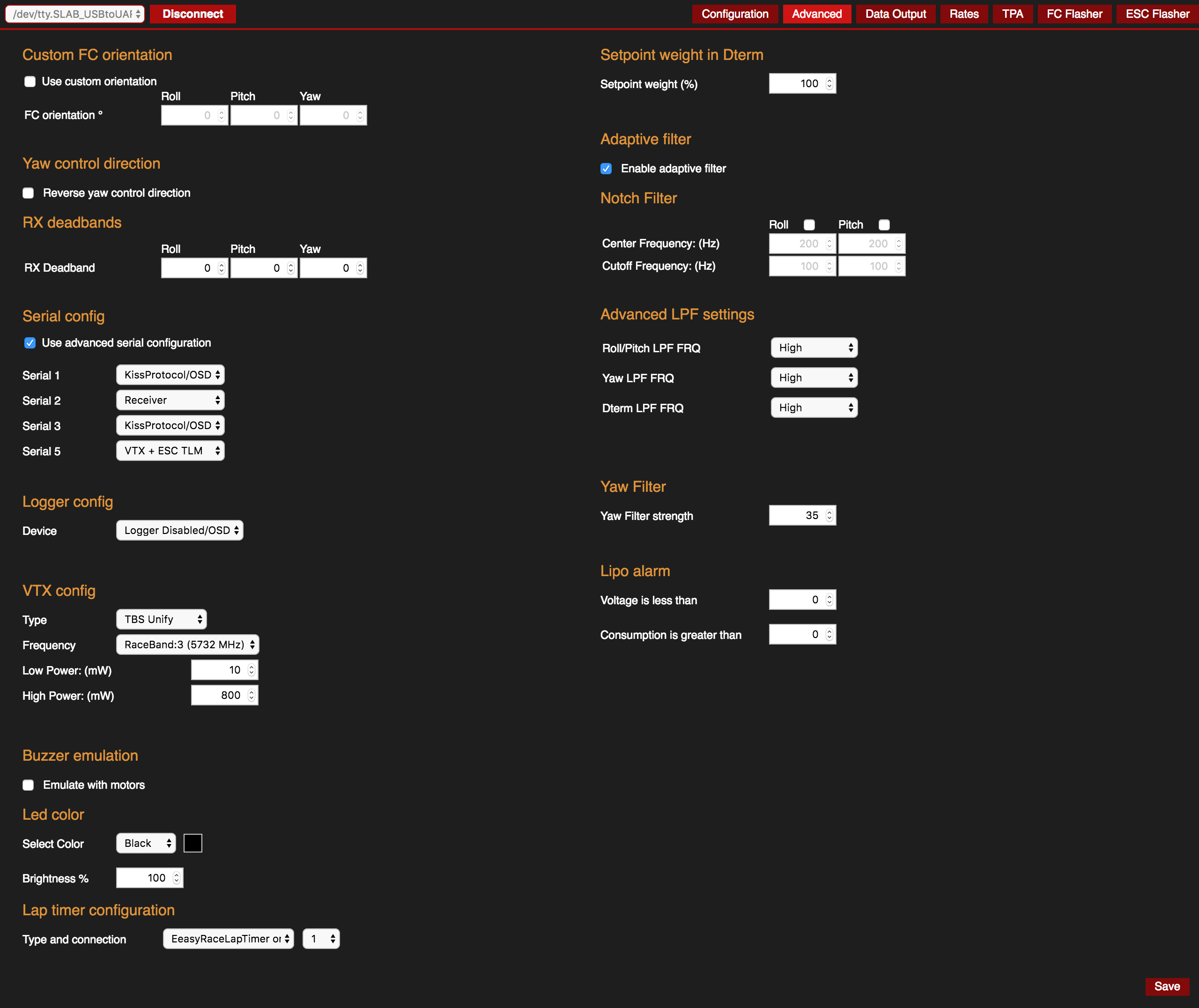
Custom FC orientation

Falls du deinen KISS FC nicht mit der Pfeilrichtung in Flugrichtung ausrichten möchtest, kannst du unter diesem Menü den KISS FC drehen. Du kannst auf jeder Achse einen positiven oder negativen Winkel angeben.
Negativ = links herumgedreht
Positiv = rechts herum gedreht
Serial Config
Unter „Serial Config“ kannst du zum Beispiel auswählen ob du ein OSD am seriellen Port betreiben möchtest.
Kiss MinimOSD
KISS MinimOSD Firmware
Anleitung

Außerdem lässt sich damit ein serieller Logger mit Daten füttern.
Folgende Daten können in einer Logfrequenz von 10–100% geloggt werden:
- Raw Gyroscope
- Raw Accelerometer
- ESC Voltage
- ESC Current
- ESC Temperature
- ESC RPMs
- ESC Consumption
Blackbox/ Logger Hardware: Flyduino (OpenLog) – KISS Black Box Firmware
Speichermedium: Es wird eine Class 10 MicroSD-Karte empfohlen
Log Viewer: Betaflight – Blackbox Explorer (Google Chrome Erweiterung)

Lap Timer

Mit einer IR-LED und einem 30-Ohm-Widerstand kannst du den EasyRaceLapTimer benutzen.

Es können folgenden Ausgänge genutzt werden: Buzzer Pin, PWM5 Pin, PWM6 Pin
LiPo-Alarm
LiPo-Warnung bei Unterschreitung der eingestellte Grenze. Einstellbarer Bereich beträgt 0–26 V.
LED Color

Es können folgende Farben ausgewählt werden.
Black, White, Yellow, Orange, Red, Purple, Blue, Green, Cyan, Custom
Die LED wird wie folgt angeschlossen. Es wird empfohlen eine externe und ausreichend dimensionierte 5-V-Spannungsquelle zu wählen.

Hier der vollständige KISS FC Anschlussplan.
Notch Filter
Der Notch Filter wird nur benötigt, um einen bestimmten kleinen Bereich von Frequenzen zu filtern, in dem Vibrationen auftreten können.
Bitte nur aktivieren, wenn der Filter mit Hilfe der Blackbox eingestellt wird.
Center frequency: Ist die Mitte des Bereichs, um den gefiltert wird
Cutoff frequency: bestimmt den Frequenzbereich über und unter „Center frequency“
Beispiel
center = mittlere Frequenz (z.B 400Hz)
cutoff = kleinste Frequenz (z.B 300Hz)
gefilterter Bereich = kleinste Frequenz bis center − lowest + center
gefilterter Bereich = 300 bis (400 − 300) + 400 = 500, der Bereich ist also 300 − 500Hz
Yaw Filter
YAW filter strength bestimmt die Einflussgröße, die der Filter auf die YAW-Achse hat.
Dieser Filter kann helfen, das „grinding noises“ auf manchen Setups entgegen zu wirken
Er ist unabhängig von dem Notch Filter.
Bei 0 ist der Filter aus. Das Filter wirkt exponentiell, also je höher, desto mehr Filterung.
Beispiel
Setzt man ein Filter von 92% bis 97% wird mehr filtern als wenn man 50% bis 60% einstellt
Formel dahinter: Mix value = old value x (0%) + new value x (100-0%)
Tab: Data Output
Unter „Data Output“ kannst du verschiedene Sensoren und Infos einsehen wie zum Beispiel die LiPo-Spannung, Rechenaulastung der MCU, Winkel, in der sich die Flugsteuerung befindet und vieles mehr.
Receiver: Hier kannst du prüfen, ob deine Kanäle korrekt zugeordnet sind und die Stickwege korrekt arbeiten
Other: Mode: zeigt den aktuellen Flugmodus an, Status: zeigt an, ob das Modell „gearmt“ oder „disarmed“ ist.
Calibrate Accelerometer: Button zum kalibrieren des Beschleunigungssensor
Motor Test
In den „Motor Test“ gelangst du, indem du unter „Motors“ auf „Test“ klickst.
Achtung: Immer die Propeller entfernen, wenn du mit einem eingesteckten LiPo an der Flugsteuerung arbeitest.
Tab: Rates
In diesem Fenster kannst du deine Rates einstellen und auch gleich testen. Es wird dir außerdem auf jeder Achse die aktuelle Anzahl an Flips, Rolls oder Turns angezeigt.
Tab: TPA
In diesem Menü kannst du deine PIDs automatisch nach Throttlewert und/oder Batteriespannung nach deinen Vorgaben anpassen (erhöhen/verringern).
TPA Influence
Hier kannst du die TPA-Kurve für den Gas-Kanal anpassen
PID Voltage Correction (Battery Influence)
Hier kannst du deine PIDs automatisch deiner LiPo-Spannung anpassen lassen
Tab: ESC Flasher
Mit dem ESC Flasher ist es nun noch einfacher deine KISS 24A RE ESCs zu flashen. Du benötigst ESCs mit mindestens der Version 1.02, um dieses Feature nutzen zu können.
Auch hier gilt unbedingt: Propeller ab!
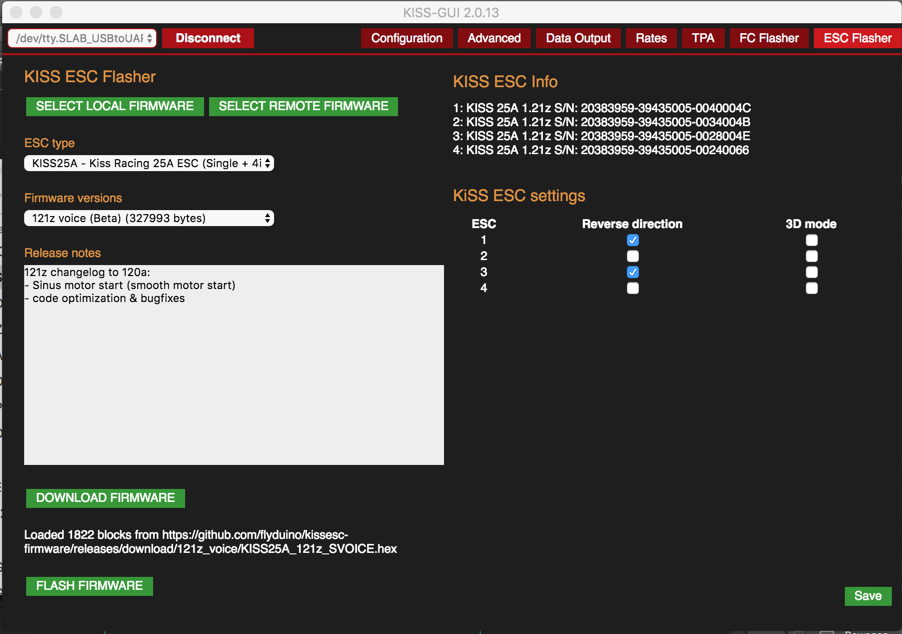
Unter „SELECT FIRMWARE“ kannst du nun deine Firmware auswählen, die du flashen möchtest.
Ich hoffe dir hat mein KISS FC Handbuch gefallen und du empfiehlst es gerne weiter. Falls du Fragen hast, zögere nicht, diese in den Kommentaren weiter unten zu stellen.
Weitere Artikel
Der Beitrag Flyduino KISS FC Handbuch erschien zuerst auf Phils Blog.