Ja, ich habe es getan. Ein weiterer Quadcoper muss her. Nachdem ich schon den ImmersionRC Vortex 285 als RTF Quad geflogen bin, habe ich mir nun einen TBS Vendetta bestellt. In diesem Beitrag möchte ich euch den Vendetta vorstellen. Vor allem möchte ich euch viele viele Fotos vom Vendetta zeigen und auf alle Komponenten eingehen.
Dieser Vendetta ist aus der ersten Batch (kein Prototyp). Es gibt noch ein paar Dinge zu verbessern und Schwachstellen. Mehr dazu erfahrt ihr am Ende dieses Artikels. Kürzlich gekaufte Vendetta können also anders aussehen, als in diesem Artikel.
Gekauft habe ich den TBS Vendetta über den Onlineshop von www.rctech.de. Ein klasse Shop im Bereich FPV Racing.
![tbs_vendetta_rctech_paket]()
Vorweg ein Video von Rolf Venz mit seinem „Venzdetta“
TBS Vendetta
Der TBS Vendetta wurde von Teamblacksheep entwickelt und ist der erste Ready to Fly Racing Quadcopter im Kohlefaser-Monoqoue Gehäuse. Im Inneren des Vendetta werkeln ausschließlich die Top-Produkte von Teamblacksheep. Inspiration zu dem Monoqoue Frame waren damals die handgefertigten Beetle/Viper Frames von Klaus.
Unboxing
![tbs_vendetta_unboxing]()
In diesem kleinen Video möchte ich euch den Lieferumfang zeigen.
Die nachfolgenden Videos sind leider ohne Sound, da meine Kamera die Soundspur zerrissen hat. ![😉]() Aber ich habe euch etwas Musik unter die Videos gelegt
Aber ich habe euch etwas Musik unter die Videos gelegt ![😉]()
Hardware
Wie oben bereits erwähnt sind im Vendetta nur Produkte von TBS verbaut. Alles ist modular aufgebaut und wird über/durch Steckern miteinander verbunden. Alle Komponenten (bis auf Motoren) sind lötfrei auszutauschen. Nachfolgend möchte ich euch die einzelnen Komponenten einmal etwas genauer vorstellen.
Monocoque Frame
Zu allererst möchte ich jedoch auf den Monocoque Frame zu sprechen kommen. Der Frame des TBS Vendetta besteht nur aus 3 Kohlefaser-teilen. Zwei Arme für die Motoren und ein Gehäuse für den Rest der Elektronik und Steuerung. Da der Frame selber nur aus einem Stück besteht, ist die Elektronik bestens darin geschützt. Lüftungsschlitze sorgen für eine gute Kühlung, lassen aber auch viel Dreck und Staub in den Innenraum.
![tbs_vendetta_frame (1)]()
In diesem Foto sieht man die Antirutsch-Pads des Vendettas. Mit zwei Velcrostraps wird der LiPo bombenfest auf dem Frame gehalten.
![tbs_vendetta_frame (2)]()
Auf der Unterseite sieht man die Löcher zum verschrauben der Arme.
Die Arme werden nicht mit dem Frame direkt verschraubt, sondern mit dem Kunststoff Chassis, denn dort befinden sich 4 Einpressmuttern.
![tbs_vendetta_frame (3)]()
![tbs_vendetta_frame (4)]()
Quick-Swap – Arme mit MT30
Wirklich sehr durchdacht und innovativ sind die Arme des TBS Vendetta. Der Frame besitzt zwei Arme, die jeweils in der Mitte dessen mit nur 4 Schrauben verschraubt werden. Die Verbindung der Motoren zu den ESCs geschieht über einen MT30 Stecker. Bisher gab es keinen mir bekannten Frame, auf dem man innerhalb von einer Minute zwei komplett bestückte Arme tauschen kann.
Der Vendetta wird mit Cobra CM2204 – 2300KV ausgeliefert. Bestückte und unbestückte Arme können zu fairen Preisen nachgekauft werden.
![tbs_vendetta_quick_swap_arms (2)]()
Die Arme werden mit MT30 Steckern mit den ESCs verbunden.
![tbs_vendetta_quick_swap_arms (3)]()
In diesem Video seht ihr, wie man den Vendetta grob zerlegt, den Kamerawinkel einstellt und ein paar Nahaufnahmen der verbauten Hardware.
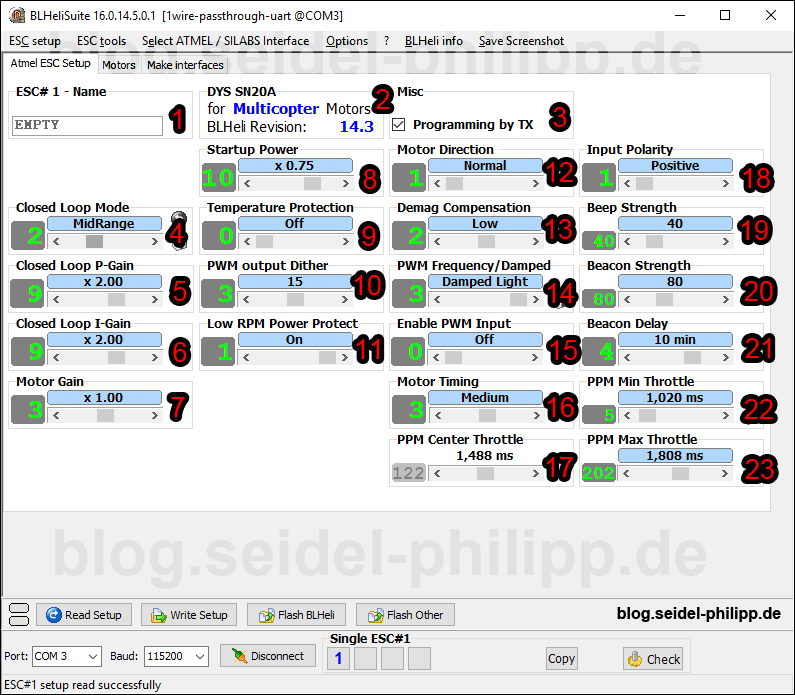
TBS Powercube
Das Herzstück des TBS Vendetta ist der bekannte TBS Powercube.
- F3 Flugsteuerung für Baseflight/Cleanflight/Betaflight/Raceflight(ungetestet)
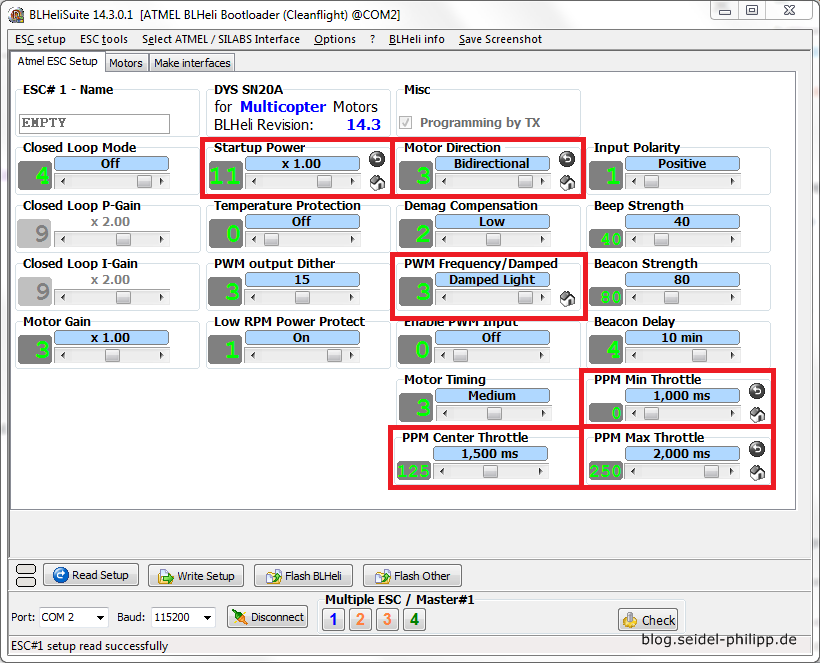
- 20A ESCs BLHeli Firmware (30A mit Kühlung, 50A Peak)
- für LiPos mit 2-6 Zellen
- 120A PDB
- 100A Strommesser (250A peak)
- Gewicht: 70g
![tbs_vendetta_cube]()
Colibri F3 FlightController
In dem Vendetta werkelt die Colibri F3 Flugsteuerung. Ich fliege den Vendetta mit Betaflight und bin sehr zufrieden mit dem Flugverhalten. Als Empfänger nutzte ich einen FrSky XSR. Ich habe testweise auch einen X4R gestripp (naked) und eingebaut. Größere Empfänger passen allerdings nicht, denke ich. Wie man Betaflight auf dem Vendetta installiert, erkläre ich euch später.
- STM32F303 Chipsatz
- Eingangssignale: PPM, SBUS, DSM, DSMX
- unterstützt RGB LEDs wie WS2812
- 5V Buzzer Ausgang
![]()
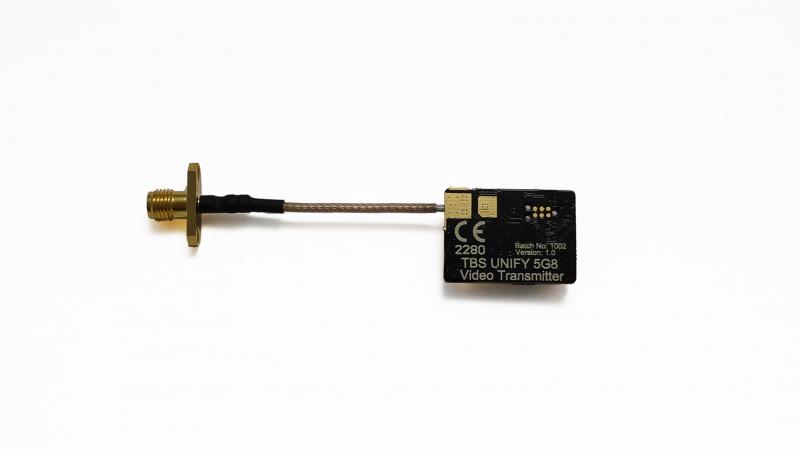
TBS Unify Pro VTX
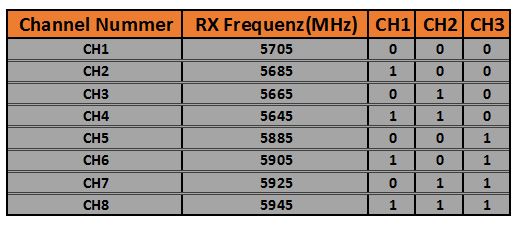
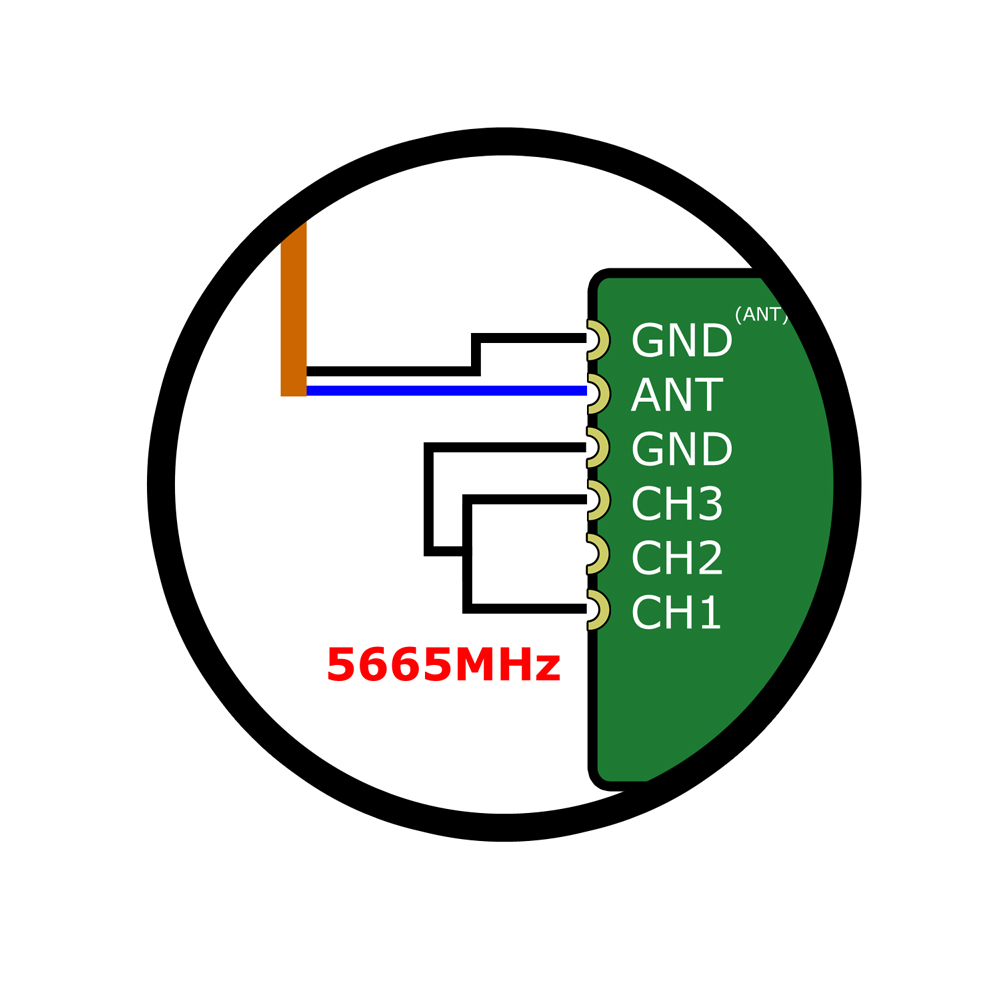
Der kleine 5,8 Ghz Video Sender von Team Blacksheep ist in einer abgeänderten Version im Vendetta verbaut. Das Antennenkabel ist nicht verlötet wie auf dem Bild unten, sondern besitzt ebenfalls einen Stecker (u.fl). Damit bleibt TBS der Plug and Play Linie treu.
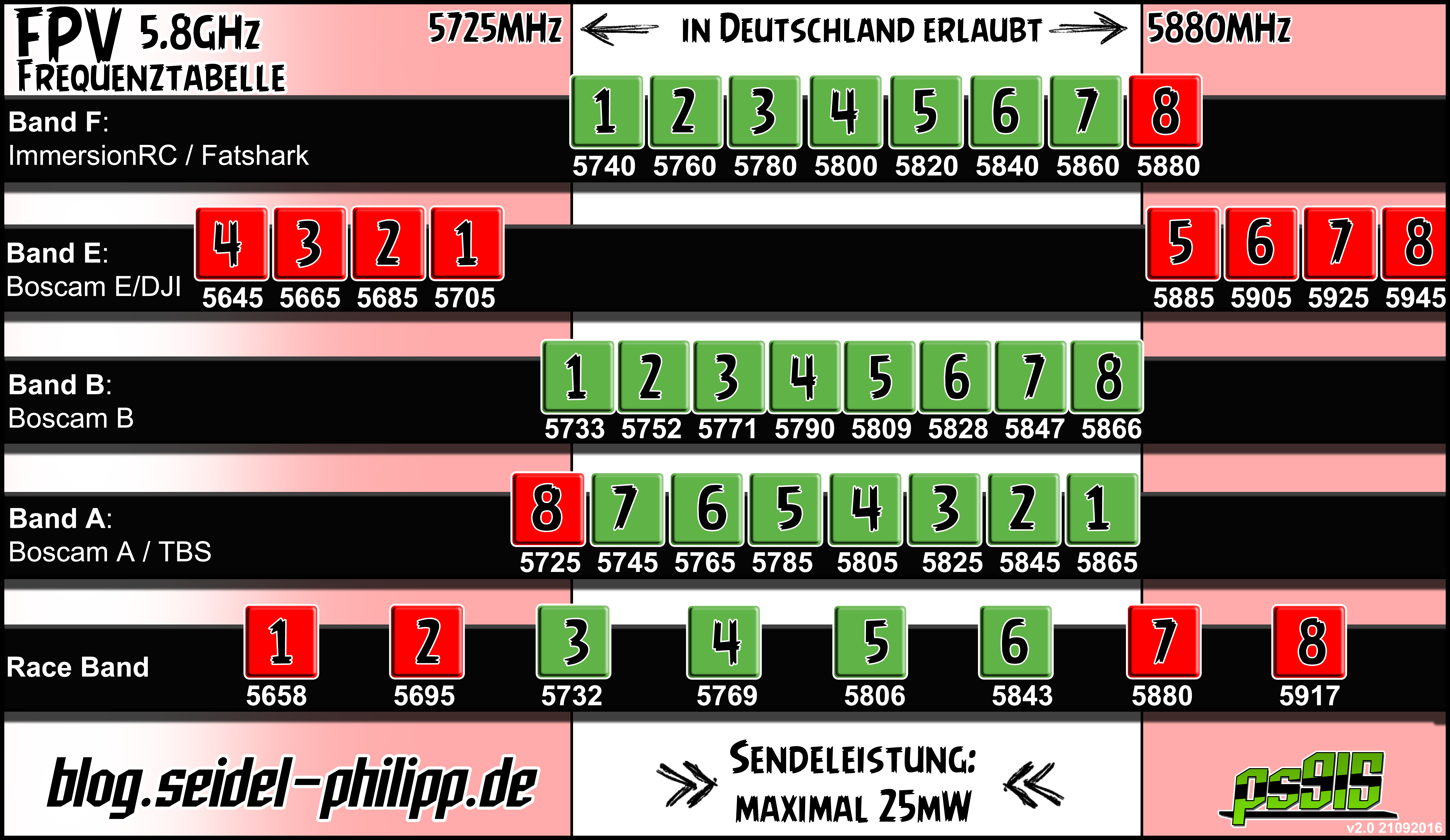
Ebenfalls ein tolles Feature, welches sich hoffentlich in der Zukunft auch bei anderen Sendern durchsetzten wird, ist die Möglichkeit der Auswahl der Sendeleistung. Wenn man den Vendetta in Deutschland fliegen möchte, kann man ihn mit 25mw fliegen. Im Ausland können dann weitere Leistungen freigeschaltet werden: 200mw, 500mw und 800mw
Der Sender kommuniziert mit dem Core PNP Pro OSD und die Kanäle und Bänder können dann per Fernsteuerung umgeschaltet werden.
![DSC07439zz]()
![tbs_vendetta_antenna]()
Achtet bei der Installation eures Empfängers darauf, dass er nicht auf dem Knopf des Unify Pros liegt. Es soll schon vorgekommen sein, dass im Flug der Videosender sich von alleine umgeschaltet hat. Eventuell wäre es von Vorteil, den Unify Pro einfach umzudrehen.
Im unteren Bild seht ihr zwischen den beiden Einpressmuttern ein Loch, welches nachträglich in das Kunststoff Chassis eingebracht worden ist. Ich habe einen Vendetta aus der ersten Batch bekommen, dort ist dieses Loch vorhanden. In den neueren Versionen ist das Design bereits angepasst und es gibt dieses Loch nicht mehr in dieser Form.
![tbs_vendetta_vtx_unify_pro]()
Die FPV Antenne schaut hinten aus dem Vendetta heraus und kann bei Bedarf wie im Foto etwas hochgebogen werden.
![tbs_vendetta_tbs_triumph (1)]()
TBS Triumph Antenne
Natürlich verbaut TBS nur die neuen Triumph Antennen. Damit man die Antenne einfach mit dem Vendetta verschrauben kann, wurde ein weiterer Schrumpfschlauch über den SMA Anschluss angebracht.
![tbs_vendetta_tbs_triumph (2)]()
![tbs_vendetta_tbs_triumph (4)]()
Leider ist mir nach nur kurzer Zeit schon die erste Antenne in der Mitte des SMA Connectors gebrochen. Leider möchte TBS die Antenne auch nicht tauschen. Alle anderen TBS Triumph Antennen haben schon wesentlich mehr Crashs eingesteckt und ich bin äußerst zufrieden mit den Antennen. Gerade das ausgeschäumte Kunststoffgehäuse gefällt mir sehr gut.
Tipp: Falls ihr andere Antennen benutzten wollt, werft auch einen Blick auf meinen Antennenschutz aus dem 3D Drucker.
![tbs_triumph_broken]()
TBS CORE PRO
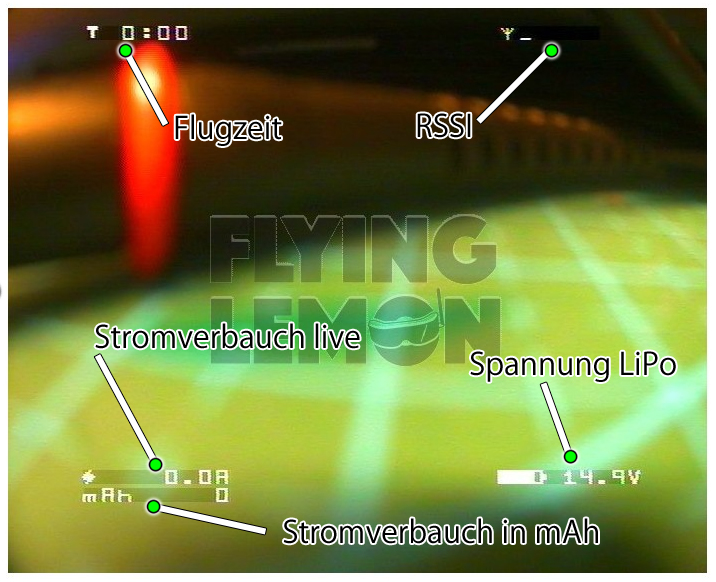
Das OSD ist derzeit ein wichtiger Bestandteil eines Race-Copters und immer mehr Piloten verwenden diese. Im Vendetta werden unter anderem die LiPo Spannung, Momentanstromverbauch, Stromverbrauch gesamt, Zeit und Spannungswarnungen angezeigt. Das OSD im Vendetta zeigt aber nicht nur die oben genannten Dinge an, sondern kann auch weitaus mehr. Mit der Funke können die verschiedensten Einstellungen des Copters geändert werden.
![tbs_vendetta_osd_pnp_pro_racing_core]()
Hier ein kurzes Video in dem ihr sehen könnt, was ihr mit dem OSD alles einstellen könnt.
TBS ZeroZero FPV Kamera
![tbs_vendetta_zerozero]()
In der ersten Batch wurden leider TBS ZeroZero Kameras mit falschen Einstellungen versendet. Leider kann man die Einstellungen nicht auf dem Feld mit einem OSD Kabel vornehmen. Es gibt mittlerweile einen Fix bei dem an der Kamera zusätzlich gelötet werden muss. Ich habe mich allerdings dafür entscheiden, eine HS1177 Kamera zu verbauen. Vom Gehäuse sind die Kameras baugleich und passen 1:1 in den Vendetta. Lediglich der Stecker muss auf das HS1177 Layout umgepinnt werden. Die neueren Vendetta weisen diesen Fehler aber nicht mehr auf.
Hier ein Vergleich zwischen HS1177, zerozero und gefixter zerozero.
![]()
Cobra 2204/2300 Motoren
Für ordentlich Vorschub sorgen 4 Cobra 2204 Motoren. Die stock PIDS sind für diese Motoren mit HQ Tri Props erstellt worden und es sollte auch nur diese Kombination geflogen werden, wenn man in den Genuss perfekter PIDs kommen möchte. Natürlich kann man auch andere Motoren verbauen oder andere Propeller auf den Cobras fliegen, dabei solltet ihr aber folgenden Tipp ernst nehmen:
Fliegt keine DAL Bullnose Tri auf diesen Motoren. Ein Freund hat damit mehrere Motoren gegrillt. Sie werden extrem heiß und saugen den LiPo extrem schnell leer. Selbst die Motorkabel werden bei diesen Propellern so heiß, dass die Plastikabdeckung des Arms anschmelzen.
Ich fliege auf dem Vendetta die originalen HQ Propeller oder auch die DAL TJ 5045 Tri, da werden die Motoren nicht warm. Ich hätte mir Cm2206 Motoren gewünscht. ![😉]()
![tbs_vendetta_cobra_2204_motors]()
![tbs_vendetta_arms (3)]()
![tbs_vendetta_arms (1)]()
RGB LEDs
Am Heck des Vendetta sind 10 ultrahelle LEDs verbaut. Diese lassen sich normal per Cleanflight konfigurieren. Außerdem kann man ein Feature aktivieren, welches die LEDs in einer Farbe leuchten lässt die einem bestimmten Kanal entspricht. Wenn man also mit mehreren Vendetta gleichzeitig fliegt, sieht man auf den ersten Blick, ob jeder seine eigene Frequenz eingestellt hat.
![tbs_vendetta_led2]()
Die LEDs werden durch den LED Deckel diffuser und ergeben ein schönes Rücklicht. Leider ist der LED Deckel nur geklebt und nicht mit einem Clip versehen. Dadurch fallen die LED Deckel reihenweise ab. Bei mir war der LED Deckel schon nach der ersten unsanften Landung abgefallen. Man kann den LED Deckel aber mit einem Kabelbinder sichern bis TBS den Deckel überarbeitet hat.
![tbs_vendetta_led]()
Welcher LiPo
Ich fliege auf dem Vendetta ausschließlich 4S LiPos mit Kapazitäten von 1300-1800mah. Am besten gefallen mir die Tattus mit 1550mah.
Der LiPo wird durch die Anti-Rutsch Pads perfekt auf dem Quad gehalten.
![tbs_vendetta_LiPo_pads]()
Ein paar Fotos von Turnigy 1800mah und Tattu 1550mah LiPos.
![tbs_vendetta_LiPo (6)]()
![tbs_vendetta_LiPo (4)]()
![tbs_vendetta_LiPo (7)]()
![tbs_vendetta_LiPo (3)]()
![tbs_vendetta_LiPo (1)]()
Software
Cleanflight
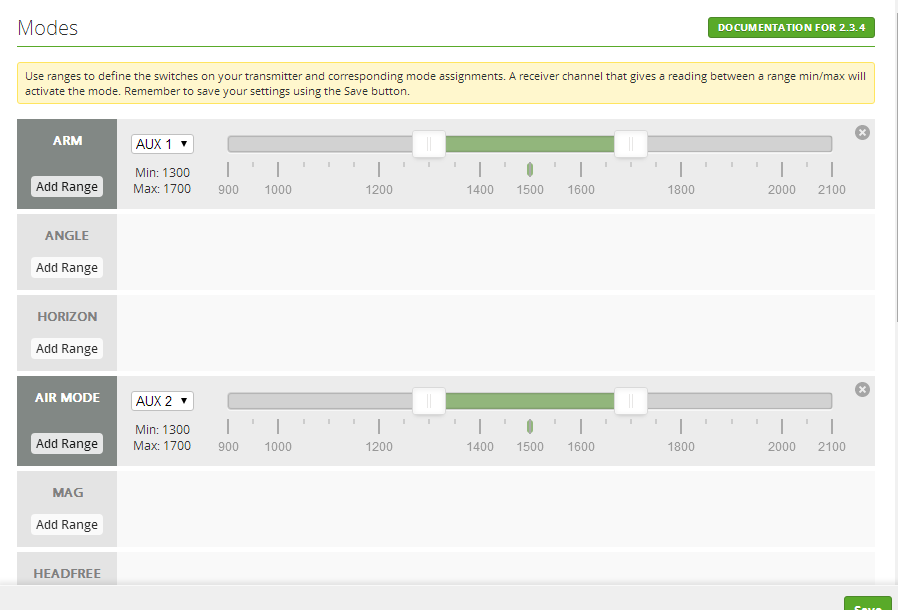
Auf dem Vendetta läuft im Originalzustand Cleanflight. Die PIDs sind bereits voreingestellt. Man muss nur die Rates nach belieben einstellen, den Empfänger konfigurieren und kann zusätzlich noch Modes, Arming und LEDs konfigurieren. Ihr benötigt dazu nur den Cleanflight Configurator und ein USB Kabel.
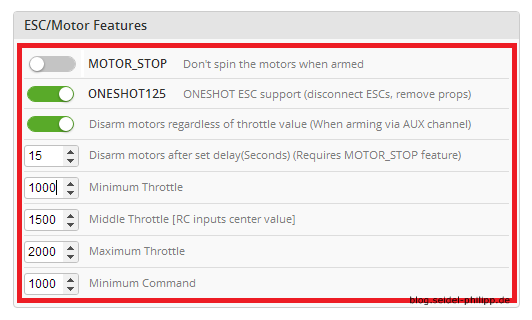
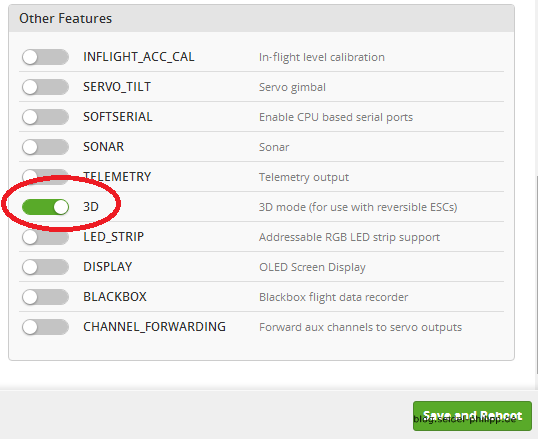
Betaflight
Um in den Genuss von Airmode zu kommen benötigt ihr Betaflight. Hier eine Kurzanleitung. Danke an Magnus dafür.
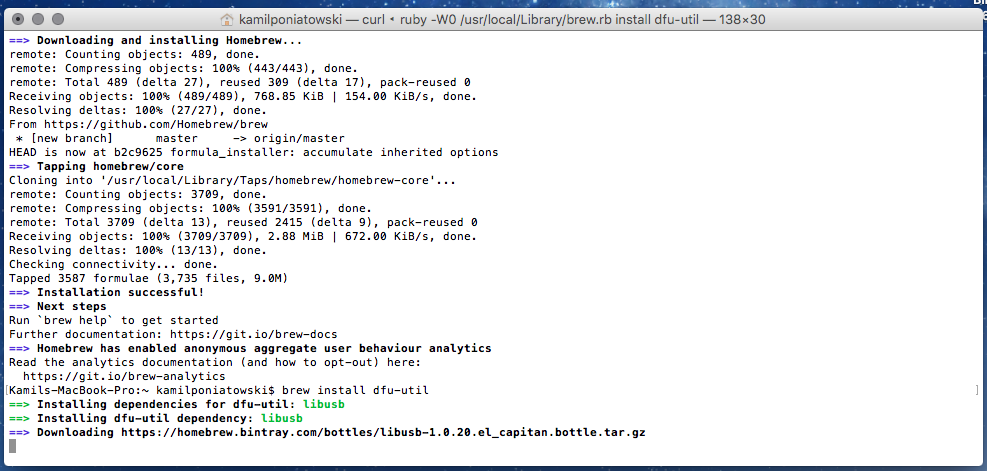
Anleitung zum flashen:
- Im Cleanflight Configurator unter Firmware Flasher die Datei „betaflight_2.6.1.hex“ lokal laden und flashen
- Im Tab Setup auf Restoer klicken und die Datei „2.Restore (choose me under setup tab, when u hit restore button).txt“ aus dem Archiv auswählen
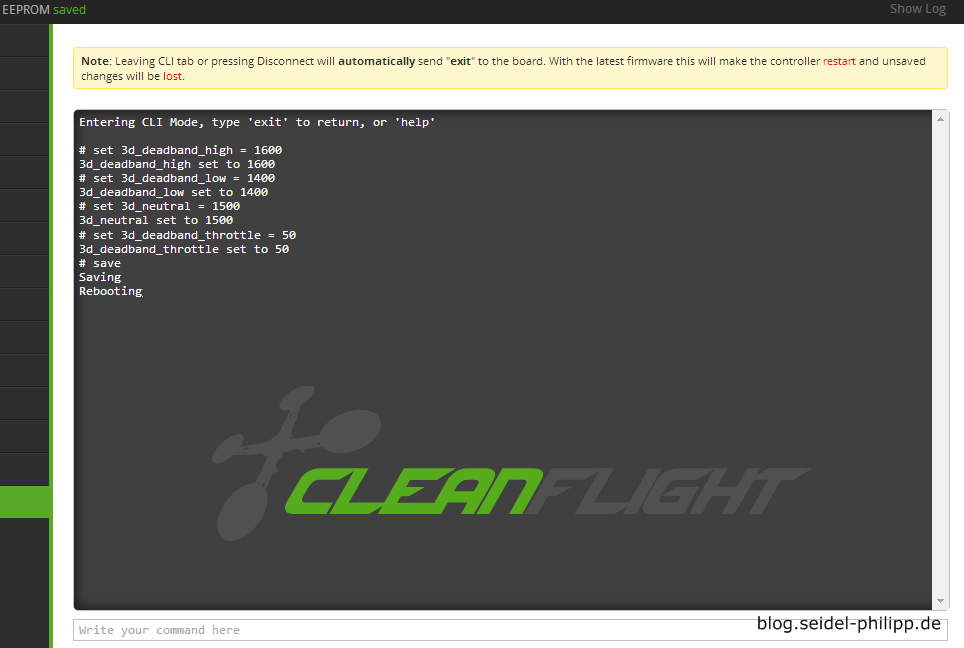
- Im Tab CLI den Inhalt der Datei „3.DUMP (copy and paste me into CLI).txt“ in das Textfeld eingeben und absenden.
- mit dem Befehl „save“ die CLI Änderungen speichern.
- nun die normale Konfiguration vornehmen (Empfänger, Modes, LEDs, Airmode,…)
Derzeit ist Betaflight 2.8 in der finalen Testphase. Mit der Veröffentlichung von Betaflight, kann man den Vortex dann über den TBS Agent flashen.
Mod: Police LED
Dein Vendetta soll blinken wie die Polizei. ![😉]() Danke dafür an Quey
Danke dafür an Quey
[VIDEO FOLGT]
Dazu müsst ihr das LED Feature aktivieren.
Danach folgendes in die CLI kopieren und abschicken. Danach „save“ nicht vergessen.
# led
led 0 8,5::ARC:2
led 1 9,5::ARC:2
led 2 10,5::ARC:2
led 3 11,5::ARC:2
led 4 12,5::ARC:2
led 5 13,5::ARC:2
led 6 14,5::ARC:2
led 7 15,5::ARC:2
led 8 8,6::ARC:2
led 9 9,6::ARC:2
led 10 10,6::ARC:2
led 11 11,6::ARC:2
led 12 12,6::ARC:2
led 13 13,6::ARC:2
led 14 14,6::ARC:2
led 15 15,6::ARC:2
led 16 8,7::ARC:2
led 17 9,7::ARC:2
led 18 10,7::ARC:2
led 19 11,7::ARC:2
led 20 12,7::ARC:2
led 21 13,7::ARC:2
led 22 14,7::ARC:2
led 23 15,7::ARC:2
led 24 8,8::ARC:2
led 25 9,8::ARC:2
led 26 10,8::ARC:2
led 27 11,8::ARC:2
led 28 12,8::ARC:2
led 29 13,8::ARC:2
led 30 14,8::ARC:2
led 31 15,8::ARC:2
# color
color 0 0,0,0
color 1 0,255,255
color 2 0,0,255
color 3 30,0,255
color 4 60,0,255
color 5 90,0,255
color 6 120,0,255
color 7 150,0,255
color 8 180,0,255
color 9 210,0,255
color 10 240,0,255
color 11 270,0,255
color 12 300,0,255
color 13 330,0,255
color 14 0,0,0
color 15 0,0,0
Bekannte Bugs und Fehler
- Arme brechen
Es kommt immer wieder vor, dass die Arme nahe dem Motor brechen. Einige Arme wurden an dieser Stelle falsch gefräst.
Reaktion von TBS: Das Problem ist TBS bekannt – Gratisarme in jedem neuen Vendetta – wenn ein Arm bricht, bekommt man kostenlos einen neuen.
- USB Loch nicht an korrekter Stelle
Leider ist bei manchen Frames das USB Loch nicht ganz mittig zur USB Buchse. Da hilft nur, den USB Stecker zu beschneiden oder das CFK anzupassen. Bei mir hat alles bestens gepasst.
Reaktion von TBS: USB Loch wird in Zukunft vergrößert
- Plastik Teile
Der Frontbumper wurde überarbeitet um mehr Kraft in den CFK Rahmen zu übertragen bei einem Crash.
Motor Bumpers werden auch angepasst, damit andere Motoren verbaut werden können.
Die Schrauben, welche die Kamera halten werden angepasst und vergrößert.
- LED Cover fällt ab
Wie oben bereits erwähnt, fällt das LED Cover bei kleinsten Krafteinwirkungen ab, da es nur geklebt ist. Mein LED Cover hat nach der dritten unsanften Landung den Abgang gemacht. Flugtechnisch macht es nichts, wenn das Cover fehlt. Allerdings sieht der Vendetta ohne Cover einfach nicht gut aus. Auch mit dem Kabelbinder Fix sieht es nicht gut aus. Ich hoffe also, dass wir bald eine überarbeitete Version erwarten dürfen.
Reaktion von TBS: LED Backcover wird überarbeitet. Die Frage ist offen, ob auch die Batch #1 Besteller ein Ersatzcover bekommen.
- TBS ZeroZero Kamera überbelichtet
Auch mein Vendetta war leider nicht FPV-tauglich. Das Bild war teilweise extrem überbelichtet und hat lange gebraucht sich wieder zu normalisieren. Da es sich nur um ein Software Problem handelt kann man die Zerozero selber fixen. Ich habe jedoch eine HS1177 eingebaut. Ich gehe stark davon aus, dass neuere ZeroZeros mit den korrekten Einstellungen ausgeliefert werden.
Reaktion von TBS: Video-Anleitung zum Fix veröffentlicht
Wenn ich Issues vergessen habt, lasst es mich unten in den Kommentaren wissen und ich werde sie in der Liste aufnehmen.
Fazit
![Vendetta_crash]()
Der TBS Vendetta ist wirklich ein echter Hingucker. Gerade der Monoqoue Frame gefällt mir sehr. Ebenfalls gefällt mir, dass man die Arme sehr schnell wechseln kann und nur mit zwei Schrauben die gesamte Elektronik aus dem Frame herausziehen kann. Wartungsarbeiten sollen sich sehr einfach gestalten, da nur das Nötigste gelötet ist und ansonsten auf Stecker gesetzt worden ist. Ganz so einfach ist die Wartung dann aber doch nicht. Bei mir war der verbaute XT60 leider zu locker, sodass sich ein Akku am XT60 festgeschmort hatte. Ich denke der Kontakt war nicht richtig, oder nur an einer kleinen Stelle gegeben. Ohne die Hilfe der Community war es mir allerdings nicht möglich den Xt60 auszubauen. Letztendlich habe ich es dann doch geschafft und warte nun auf das Ersatzteil. Leider kann man den XT60 (leicht angepasste Version) nicht als Ersatzteil bestellen, was mich etwas verwundert.
Alles in allem bin ich sehr zufrieden mit meinem Vendetta. Das OSD macht es so einfach die PIDs und Rates zu verändern, sodass ich nun keinen Laptop mehr auf dem Feld brauche. Der Support seitens TBS ist bisher auch erstklassig. In der Facebook Gruppe zum TBS Vendetta kann man mit dem Hersteller und der Community schnell ins Gespräch kommen und bekommt Hilfe.
Credits: Danke an Kay für den Vendetta. Danke Markus für die Korrekturlesung.