![]()
![]()
Teil2: INAV-Konfiguration und Testflüge
Dieser Artikel wurde von meinem Gast-Autor Albert Kravcov geschrieben. Vielen Dank Albert für diesen Artikel und deine Zeit die du investiert hast!
Vorwort
Nachdem im ersten Teil ich euch die Verkabelung gezeigt habe, geht es in diesem Teil nun um die wichtigsten Grundeinstellungen von INAV für euren Wing und die ersten Testflüge. Für manche Einstellungen werdet Ihr den Lipo anschließen müssen.
![]()
Bitte macht das auf keinen Fall mit einem montierten Propeller!
INAV Configurator
Den INAV Configurator gibt es mittlerweile als Standalone-App für mehrere Betriebssysteme. Damit könnt ihr die INAV-Firmware auf den Flightcontroller flashen und alle Einstellungen treffen.
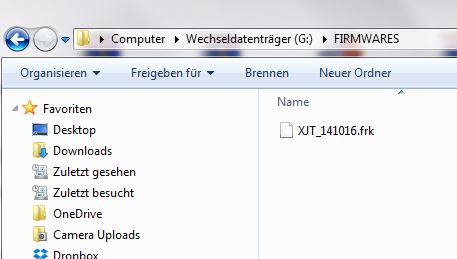
Hier geht es zum Download. Installiert alle notwendigen Treiber, verbindet den FC mit dem USB-Kabel mit eurem Rechner und klickt auf „Connect“ oben rechts.
Tipp: Das Board blinkt mit einem Fehlercode und unter Umständen piept der Buzzer ständig. Um den Buzzer zum Schweigen zu bringen tippt in dem CLI-Tab den Befehl „beeper -ON_USB“. Anschließend tippt ihr „save“ ein. Das Board startet neu und das Piepen ist Geschichte.
Presets
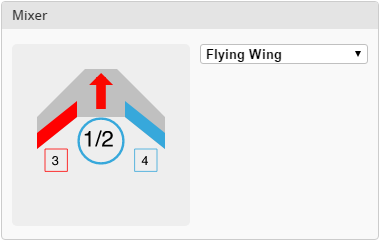
Als allererstes geht in den „Presets-Tab“ und hier wählt ihr das „Flying Wing Z84“ Preset aus. Das stellt schon mal die passenden Rates und Gyro-Einstellungen, die optimal für en Wing dieser Größe sind. Speichern nicht vergessen!
![]()
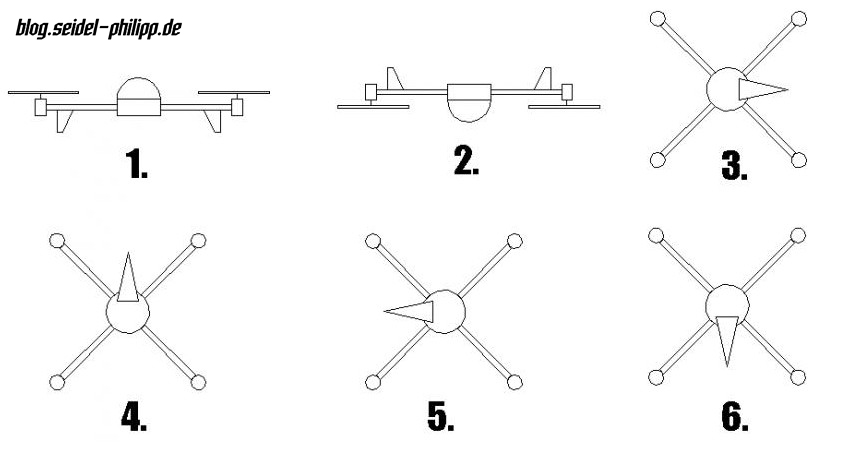
6-Punk ACC-Kalibrierung
Das ist ein sehr wichtiger Prozess und er unterscheidet sich sehr von der Kalibrierung in Cleanflight/Betaflight. Ganz wichtig ist, dass der PFEIL auf dem Flightcontroller in die Richtung entsprechend der Abbildungen zeigt. Habt ihr das Board (wie in Teil 1 empfohlen) um 90 Grad verdreht eingebaut, müsst ihr hier umdenken! Das Drehen der Board-Ausrichtung im Configurator hat hier keine Auswirkung!
Stellt den Wing in jeweils die auf den Bildern gezeigte Position (entsprechend dem Pfeil auf dem FC) und klickt nach jeder Positionierung jeweils auf den “Calibrate Accelerometer” Button im „Setup-Tab“. Der Wing muss nicht exakt ausgerichtet sein – also keine Wasserwage notwendig. Bei der Rückenposition zwei könnt Ihr den Wing mit den Tragflächen zum Beispiel auf zwei Gläser aufbocken.
![]()
Überprüft anschließend im „CLI-Tab“ ob die Kalibrierung erfolgreich war indem ihr folgendes eintippt:
„get accgain_x“
„get accgain_y“
„get accgain_z“
Die Werte sollten nicht 4096 sein.
„get acczero_x“, „get acczero_y“, „get acczero_z“ sollten ebenfalls keine „0“ ergeben.
FC-Ausrichtung
Ist euer Board verdreht eingebaut, solltet Ihn nun im „Configuration-Tab“ unter „Board and Sensor Alignment“ auf der Yaw-Achse -90/90 eingeben und anschließend auf „Save and Reboot“ klicken.
![]()
Überprüft die korrekte Lage anschließend in den „Setup-Tab“ indem Ihr die Bewegung des 3D-Modells beobachtet. Sollte alles korrekt sein, dann weiter zum nächsten Schritt.
Tipp: stellt auch die Werte für Roll und Pitch ein – bis im „Setup-Tab“ die Winkelangaben (neben dem 3d-Model) möglichst 0° sind wenn der Wing in Flugposition vor euch liegt. Achtung: Wenn ihr das Board um 90° gedreht habt, sind Roll und Pitch vertauscht!
Bleiben wir im „Configuration-Tab“ und aktivieren zunächst die PWM-Ausgabe. Diese ist vorerst deaktiviert, um analoge Servos vor Schaden zu bewahren, falls diese an einen Motor-Pin angeschlossen sind an dem ein ESC erwartet wird. Das ESC-Protokoll stellen wir auf Oneshot.
![]()
Wenn ihr möchtet, deaktiviert ihr noch „Disarm regardless of throttle value“. Das verhindert das ungewollte Disarmen in der Luft wenn ihr aus versehen den Arm-Schalter mitten im Flug umlegen solltet – es macht aber das Disarmen im Falle eines Crashes etwas schwieriger, weil Gas immer erst auf 0% stehen muss. Eure Entscheidung!
RX-Settings/Failsafe-Test
Wichtig: INAV übernimmt die Mixer-Funktion des Senders – daher ist es wichtig, dass kein Mixer-Setup in eurem Sender eingerichtet ist.
Bevor wir den Empfänger-Typ konfigurieren, sehen wir uns den „Ports-Tab“ an.
In dem Teil 1 dieser Anleitung habe ich mehrere Beispiele gezeigt wie ihr verschiedene Empfänger anschließen könnt. Der Empfänger ist am UART1 angeschlossen. Wir aktivieren „SerialRX“ also am UART1 und falls Ihr noch frsky sPort angeschlossen habt, solltet ihr auf dem UART3 „frsky“ unter „Telemetry“ auswählen (nicht invertiertes sSport-Signal notwendig).
Wo wir gerade in diesem Tab sind: Falls ihr ein GPS-Modul, wie in dem ersten Teil der Anleitung beschrieben, angeschlossen habt, stellt ihr schon mal vorweg auf UART6 „GPS“ unter „Sensors“ ein.
![]()
Zurück zum „Configuration-Tab“:
![]()
Unter „Receiver Mode“ könnt ihr den Typ auf „Serial-based receiver“ stellen nun euren Receiver-Typ auswählen (SBUS, Crossfire, Spektrum u.s.w.). Nach dem Klick auf „Save and Reboot“ sollte beim erneutem Verbinden die Failsafe-Warnung (oben unter dem Batterie-Icon) nun aus sein.
Solltet ihr den sPort eures Empfängers angeschlossen haben oder einen Chrossfire Receiver verwenden, aktiviert ihr noch zusätzlich „Telemetry“ unter „Features“.
Nach dem Reboot könnt ihr nun in den Telemetrie-Einstellungen eures Senders nach neuen Sensoren suchen.
Wir wechseln nun in den „Receiver-Tab“
Überprüft hier ob die Kanal-Ausschläge euren Stickbewegungen entsprechen und ob die Kanalzuordnung korrekt ist. Sehr wahrscheinlich müsst ihr die Channel-Map auf „JR/Spektrum/Graupner“ (TAER5678) stellen damit alles stimmt.
Stellt auch sicher, dass in zentrierter Position der Sticks, alle Werte einen Wert von 1500 haben – falls nicht, passt es in eurem Sender (sub-trim) an. Die Laufwege eurer Sticks sollten sich zwischen 1000 und 2000us bewegen.
Falls ihr einen Receiver verwendet, der auf einem Kanal den RSSI-Wert ausgibt (Crossfire oder XM+), könnt ihr hier den entsprechenden Kanal als Quelle zuordnen.
![]()
Failsafe-Einstellungen und Test
Jetzt wo der Receiver funktioniert, solltet ihr als erstes die Failsafe-Einstellungen prüfen und testen ob ein Failsafe von INAV erkannt wird. Im Failsafe-Tab finden sich die Grundeinstellungen:
![]()
Bitte bringt den Propeller noch nicht an! Schaltet euren Sender ab und beobachtet dabei das Fallschirm-Icon oben in der Statusleiste. Leuchtet es rot auf, dann hat INAV erfolgreich ein Failsafe erkannt. Falls nicht, überprüft im Receiver-Tab auf welche Position der Gaskanal springt wenn ihr euren Sender ausmacht. Es ist wichtig, dass der Wert unter 885us springt. Überprüft eure Failsafe Receiver-Einstellungen im Sender – die Einstellungen sollten – je nach System – auf „No pulses“ oder „CUT“ stehen.
Stellt auch sicher, dass beim Wiedereinschalten des Senders ihr die volle Kontrolle zurück bekommt.
Jetzt könnt ihr entscheiden, was passieren soll falls ihr die Verbindung zum Receiver verliert. Die sicherste Methode ohne GPS wäre hier „Drop“. Mit einem GPS-Modul könnt ihr RTH (Return to Home) wählen. Der Wing fliegt dann bei Verbindungsverlusst autonom zur Startposition zurück bis ihr wieder eine Verbindung habt und INAV eine Stickeingabe registriert.
Erweitere RTH Einstellungen befinden sich im „Advanced tuning-Tab“
![]()
Hier könnt ihr das Verhalten bei RTH etwas detaillierter Bestimmen. Return to Home wird übrigens nicht nur bei einen Failsafe aktiv. Bei Bedarf könnt ihr diese Funktion auf einen AUX-Schalter legen den ihr nach Belieben aktivieren könnt. Folgende RTH-Parameter wären für Wings relevant:
| RTH and Landing Settings |
| At Least
|
Standard-Einstellung. Der Wing klettert auf die definierte Höhe falls er sich gerade tiefer befindet. Falls die Position des Wings höher ist als die definiert RTH Höhe, verbleibt der Wing auf seiner Flughöhe. |
| Current |
Definierte RTH-Höhe wird komplett ignoriert. Der Wing tritt immer den Rückweg auf seiner aktuellen Höhe an. |
| Extra |
Die definierte RTH-Höhe wird mit der aktuellen Flughöhe addiert. |
| Fixed |
Der Wing klettert oder sinkt bis die definierte RTH-Höhe erreicht ist. |
| Max |
Definierte RTH-Höhe wird komplett ignoriert. RTH findet in der maximalen Flughöhe des bisherigen Fluges statt. |
| Climb before RTH |
Falls aktiv, klettert das Modell erst auf die definierte Höhe und tritt erst dann den Rückweg an. Falls deaktiviert, wird das Model auf die RTH-Höhe steigen während es sich auf dem Rückweg befindet |
| Land after RTH |
Never: keine Landung, Wing kreist über Startposition wenn diese erreicht ist.
Always: Wing versucht eine autonome Landung bei Erreichen der StartpositionOnly on Failsafe: Landeversuch nur bei einem Failsafe. |
| Min. RTH distance (cm) |
Sollte der Wing sich innerhalb des hier definierten Radius befinden, wird kein RTH aktiviert. Ein Landeversuch wird sofort unternommen (falls Landung oben definiert ist). |
| RTH Altitude (cm) |
Definiert die Flughöhe für RTH. Empfehlung: 7000 cm |
| RTH abort threshold |
Ein Sicherheits-Check der RTH abschaltet und in Notlandung übergeht, falls der Abstand zum Startpunkt währen RTH um diese Angabe steigen sollte. |
| Fixed Wing Einstellungen für autonome Flugmodi |
| Cruise throttle
|
Gasposition für Reisegeschwindigkeit |
| Min. throttle
|
Minimale Gasposition |
| Max. throttle
|
Maximale Gasposition |
| Max. bank angle
|
Maximaler Neigungswinkel |
| Max. climb angle
|
Maximaler Winkel beim Aufstieg |
| Max. dive angle
|
Maximaler Winkel beim Abstieg |
| Pitch to throttle ratio
|
Formel für die Reduzierung/Steigerung von Gas bei Sinkflug/Kurven. |
| Loiter radius [cm]
|
Radius in cm in dem der Wing bei Position Hold (oder beim Erreichen der Startposition nach RTH) kreist. |
Servo-Einstellung und Test (High Five)
Da der Receiver nun eingerichtet ist und die PWM-Ausgänge aktiv sind. Könnt ihr schon mit dem rechten Stick die Servos bewegen. Die Elevons sollten sich, wie in dem folgenden Video, immer zur Stickrichtung bewegen.
Video zum High Five:
Ein Servo wird sicher genau falsch herum sein, da diese gespiegelt in den Tragflächen verbaut sind. Hier solltet ihr den entsprechenden Servo im „Servo-Tab“ umdrehen, in dem ihr die Richtung von 100% auf -100% umstellt. Überprüft erneut die Bewegungsrichtungen. Wichtig: die Servo-Nummerierung fängt (anders als bei den Motoren) bei 0 an. In meinem Fall muss Servo 3 invertiert werden:
![]()
Motordrehrichtung
Der Propeller muss mit der Oberseite (an den Zahlen zu erkennen) in Flugrichtung montiert werden.
Solltet ihr Quad-Propeller benutzen, ist die Motordrehrichtung in diesem Fall eigentlich egal – sucht euch einfach die passenden CW oder CCW Propeller aus der 4er Packung.
Falls ihr APC (oder Ähnliche) Propeller verwendet, ist hier die Drehrichtung entscheidend, da es diese Propeller immer nur mit einer Drehrichtung gibt. Hier könnt Ihr entweder direkt mit dem BlHeli Configurator (https://github.com/blheli-configurator/blheli-configurator) die Drehrichtung ändern oder wahlweise die beiden äußeren Motorkabel am ESC tauschen.
OSD
Das On Screen Display zeigt wichtige Daten zum Status des Lipos, der Empfangsstärke und viele weitere nützliche Informationen an. Ihr könnt die Elemente ganz nach Belieben ein und ausblenden und verschieben. Auch Alarme lassen sich hier definieren.
![]()
GPS-Einstellungen
Wir haben zuvor im Ports-Tab bereits einen UART für das GPS-Modul gewählt. Nun kommen noch ergänzende Einstellungen im „Configuration-Tab“ unter „GPS“.
![]()
Konfiguriert das GPS wie im Bild oben zu sehen ist. Den Wert für „Magnetometer Declination [deg]“ könnt ihr leer lassen. Sobald diese Einstellungen erfolgt sind und das Board nach dem Speichern neustartet, sollte das GPS-Icon oben in der Statusleiste blau leuchten. Je nach FC müsst ihr eventuell erst einen Lipo anschließen um das GPS mit Strom zu versorgen.
Das GPS benötigt einige Minuten bevor es genügend Satelliten findet. Probiert es möglichst unter dem freien Himmel aus – im Bastel-Keller wird das GPS sehr wahrscheinlich kein Empfang haben. Der Buzzer lässt euch wissen wann genügend Satelliten gefunden sind. Ihr könnt die Anzahl der Sats im „GPS-Tab“ oder im OSD verfolgen.
Tipp: Wenn ein GPS angeschlossen ist, verweigert INAV das Armen so lange, bis ein 3D-Fix durch genügend Satelliten besteht. Diese Sperre könnt ihr im CLI mit „set nav_extra_arming_safety = OFF“ aufheben.
Flightmodes
INAV verfügt über viele Flugmodi´s , mit den ihr die Schalter eures Senders belegen könnt – ich erkläre hier die nur die für den Anfang am Wichtigsten. Hierzu begeben wir uns in den „Modes-Tab“:
![]()
Tipp: Armt auf jeden Fall via Schalter und nicht mit einer Stick-Kombo (https://github.com/iNavFlight/inav/blob/master/docs/assets/images/StickPositions.png) um ein versehentliches Disarmen in der Luft zu vermeiden – das ist bei einem Wing sehr viel wahrscheinlicher als bei einem Quad.
| Flightmodes |
| ARM |
Armt/Disarmt den Wing |
| ACRO (Kein Flugmodus gewählt) |
Empfohlener Flugmodus: Der Wing stabilisiert sich nicht selbständig beim Zentrieren des Sticks. |
| ANGLE |
Empfohlener Startmodus: Der Wing stabilisiert sich selbstständig und fliegt geradeaus beim Zentrieren des Sticks.
Dieser Modus wird automatisch bei RTH verwendet. |
| PASSTHRU
|
Wing fliegt wie ohne Flightcontroller – nur der Mixer ist aktiv |
| NAV ALTHOLD
|
Wing hält selbstständig die Flughöhe |
| NAV POSHOLD
|
Wing kreist auf der Stelle (mit ALTHOLD kombinieren) |
| NAV RTH
|
Return to Home |
| NAV LAUNCH
|
Startassistent: Erkennt wann ein Wing geworfen wird und startet den Wing automatisch (mehr dazu unten) |
Weitere Einstellungen
Abschließend begeben wir uns in den „PID-Tab“ und stellen für ROLL Rate 360 und PITCH Rate 180 ein.
Dann nur noch ganz unten TPA auf 0% stellen und auf Save klicken.
![]()
Zur Orientierung hier meine PIFFs von meinem Skyshadow als Ausgangspunkt:
![]()
Zuallerletzt müssen wir noch einige Einstellungen in das CLI eingeben, da es im Configurator keine Felder dafür gibt.
| CLI Befehle |
| set max_angle_inclination_rll = 600 |
Max. Winkel für Roll im stabilisierten (Angle) Flugmodus |
| set max_angle_inclination_pit = 600 |
Max. Winkel für Pitch im stabilisierten (Angle) Flugmodus |
| set small_angle = 180
|
Ermöglicht das Armen in jeder Position |
| set failsafe_throttle_low_delay = 0
|
Für Gleiter wichtig: Standardmäßig geht INAV in den Failsafe wenn Gas im Flug mehr als 10 Sekunden auf 0 stehen sollte. Mit diesem Befehl könnt ihr das deaktivieren. |
![]()
Damit wären wir mit der anfänglichen Konfiguration fertig! Alle Preflight-Checks sollten im „Setup-Tab“ nun Grün sein. Nun geht es zum Spanneden praktischen Teil.
Übrigens: Das INAV-Wiki ist super ausgearbeitet und wirklich empfehlenswert falls Ihr euer Wissen vertiefen möchtet.
Das Wiki findet ihr hier: https://github.com/iNavFlight/inav/wiki
Alle CLI-Befehle hier: https://github.com/iNavFlight/inav/blob/master/docs/Cli.md
Erster Wurftest
Bevor es nun aufregend wird, fangen wir ganz sachte an. Geht mit eurem voll beladenen Wing raus und sucht möglichst eine Wiese mit etwas höherem Gras. Nun werft den Wing wie ein Papierflugzeug möglichst gerade. Es sollte segelnd mit dem Bauch aufkommen. Ist es nicht der Fall, überprüft bitte das CoG (Center of Gravity).
Tipp: Checkt vor jedem Flug die Funktion der Servos. Sitzen die Servos immer noch fest? Hat sich der Propeller gelockert? Überprüft die Motorhalterung.
Wurftechnik
Bevor ihr den ersten Flug antretet, solltet ihr euch Gedanken machen wie ihr den Wing starten möchtet. Hier ein Video zu Wurftechniken.
Tipp: Startet immer im Angle-Mode (alternativ auch mit NAV Launch). So hält sich der Wing ganz selbstständig gerade in der Luft und ihr könnt (wenn ihr etwas Höhe gewonnen habt) ganz relaxed eure FPV-Brille aufsetzen.
Flug1 (Passthrough)
Der erste Wing-Flug ist Adrenalin pur – zumindest haben meine Hände damals ganz schön gezittert. Bereitet euch darauf vor, dass ihr nicht gleich beim ersten Wurf in der Luft seid und ein paar Mal ins „Gras beißt“ bevor der Start klappt. Startet im ANGLE Mode. Sobald ihr in der Luft seid könnt ihr auf ACRO umschalten. Fliegt ganz gemütlich ein paar Runden, werdet mit dem Wing etwas vertraut. Es kann sein, dass der Flug etwas wackelig verläuft und der Wing driftet.
Schaltet nun in den PASSTHRU Mode und beobachtet ganz genau wie der Wing sich verhält. Kippte er mit der Nase weg? (CoG oder Flex-Problem). Driftet er in eine bestimmte Richtung? (Elevons stehen nicht gleich gerade/CoG/Drag).
Hat sich der Wing im PASSTHRU irgendwie auffällig gezeigt, versucht die Probleme am Boden zu lösen, bis der Wing in diesem Modus sich ok fliegen lässt.
Flug2 (Servo-Autotrim)
Beim zweiten Flug kümmern wir uns um die Elevons. Hierfür müsst ihr dem Mode SERVO AUTOTRIM auf einen Schalter legen. Aktiviert den Schalter im Flug während ihr versucht so gerade wie möglich zu fliegen. In 5 Sekunden ermittelt der Mode die beste Mittelpunkt-Servoposition aus den Durchschnittswerten.
Sollte euch der neue Wert nicht gefallen, einfach den Mode wieder deaktivieren und von vorne anfangen.
Sollten die neuen werte passen, deaktiviert SERVO AUTOTRIM nicht! Landet und disarmed den Wing – erst jetzt werden die neuen Werte gespeichert und ihr könnt den Mode deaktivieren.
Flug3 (Board-Alignment)
Den dritten Flug verbringt ihr komplett im ANGLE Mode und beobachtet ob der Wing ohne Eingabe des rechten Sticks gerade fliegt. Sollte das nicht der Fall sein, solltet Ihr im „Configuration-Tab“ unter „Board and sensor alignment“ die pitch/roll Achse entsprechend gegentrimmen bis der Wing im ANGL Mode geradeaus fliegt ohne groß abzusinken oder zu steigen.
Flug4 (Autotune)
Um die passenden PIDs (PIFF) für euren Wing zu finden, empfehle ich euch Autotune durchzuführen. Hierfür legt ihr den AUTOTUNE Mode auf einen Schalter und aktiviert diesen im Flug sobald ihr Höhe gewonnen habt.
Es könnte sein, dass der Wing sich am Anfang sehr schwammig anfühlt. Führt schnelle und maximale Stickbewegungen aus. Erst auf einer Achse dann auf der Anderen. Alle 5 Sekunden werden neuen Werte für den PIFF Controller errechnet. Je länger ihr das macht, desto besser wird es.
Wenn ihr zufrieden sein solltet, schaltet ihr AUTOTUNE ab – die Werte werden zwischengespeichert, aber noch nicht endgültig!
Auf keinen Fall mit aktivem AUTOTUNE landen, da falsche Werte ermittelt werden.
Nach der Landung bitte erst disarmen und dann per Stick-Combo die Werte speichern – Beide Sticks maximal nach unten und nach außen drücken.
Tipp: Sollte der Wing immer noch etwas zu stark auf einer Achse wackeln, solltet ihr „P“ für diese Achse schrittweise erhöhen.
Flug5 (GPS Test)
Beim letzten Testflug testen wir die GPS Modi. Hierfür benötigen wir NAV POSHOLD+NAV ALTHOLD und NAV RTH jeweils auf einer Schalterposition.
Sucht euch eine große überblickbare Fläche für diesen Test. 3D GPS-Fix mit genügend Satelliten (8+) ist Voraussetzung.
Startet und gewinnt an Höhe. Aktiviert zunächst POSHOLD zusammen mit ALTHOLD und ihr solltet beobachten wie der Wing an der letzten Position seine Kreise zieht. Sollte das zuverlässig funktioniert haben, können wir uns an den RTH-Test wagen.
Fliegt ein gutes Stück von euch weg und aktiviert RTH. Der Wing sollte drehen und sich so verhalten wie ihr es in den RTH-Einstellungen definiert hattet.
Wenn ihr seht, dass der Wing über euch kreist oder zur euch zurückkommt – hat RTH funktioniert. Ihr könnt jederzeit mit Stick-Inputs eingreifen oder den Mode deaktivieren, falls sich der Wing merkwürdig verhalten sollte.
Von der automatischen Landung rate ich euch ab – die sollte der Wing nur in einem Notfall selbstständig versuchen.
Current Sensor Kalibrierung
Es ist recht einfach den Current Sensor zuverlässig zu kalibrieren damit dieser korrekte Werte ausgibt. Dafür benötigt ihr lediglich einen Testflug und ein Ladegerät.
![]()
- Fliegt einen voll geladenen Lipo leer und notiert euch den mAh Wert des OSDs. = A
- Zu Hause angekommen ladet ihr den Lipo wieder voll und notiert euch die geladene mAh = B
- Notiert euch die aktuelle Current Scale von INAV (in dem Bild oben 265) = C
Die Formale lautet: (A/B)*C = neuer Wert für „Current Scale“.
NAV LAUNCH
Wie oben erwähnt kann dieser Mode automatisch euren Wing starten, wenn der Wing in einem bestimmten Winkel geworfen wird. Für einen Autolaunch müsstet ihr so vorgehen:
- NAV Launch Mode durch einen Schalter aktivieren
- ARM durch einen Schalter aktivieren (Buzzer-Piepen ertönt regelmäßig)
- Sicherstellen, dass der Motor keine Gasbewegungen annimmt
- Gas-Stick etwa in die Mitte positionieren
- Wing möglichst gerade werfen
- Motor wird starten sobald der Wurf erkannt wurde und der Wing steigt stabilisiert
- Nach 5 Sek. wird Autolaunch automatisch abgebrochen und die Kontrolle übergeben oder sobald ein Stick-Input durch INAV registriert wird.
Einige wichtige CLI-Einstellungen (es gibt noch mehr) müsstet Ihr für die Benutzung wissen:
nav_fw_launch_max_angle: 45 – Gibt den maximalen Wurfwinkel an in dem ein Launch erkannt wird. Winkel= Roll-Winkel+Pitch-Winkel. Wird dieser Winkel überschritten wird Autolaunch abgebrochen.
nav_fw_launch_thr = 1700 – Gasposition beim Autostart
nav_fw_launch_motor_delay = 500 Zeitspanne (ms) zwischen Wurferkennung und Motorstart
nav_fw_launch_timeout = 5000 – Zeitspanne (ms) nach der Autolaunch abgebrochen wird
nav_fw_launch_climb_angle = 18 – Steigewinkel in Grad
Und nun das Wichtigste: Have fun!
Der Beitrag FPV Wing aus Kopter-Teilen bauen mit INAV – Teil 2 erschien zuerst auf Phils FPV Blog.


























































































































































































 Danke Benni für das Modul!
Danke Benni für das Modul!








































