


Im letzten Jahr ist mir auf dem FPV Rennen in Bexbach die Idee gekommen für die nächsten Events einen FPV Splitscreen zu bauen um die Rennen aus den Perspektiven aller Piloten verfolgen zu können.
Leider habe ich mein Projekt zum Friedewalde FPV Festival nicht fertig bekommen. In Nördlingen hatte ich nun erstmals meinen Prototypen dabei und war begeistert wie gut das Gerät funktioniert hat und angekommen ist. Seit den ersten Fotos auf Facebook hatte ich viele Anfragen, sodass ich mich natürlich dafür entschlossen habe einen Artikel darüber zu schreiben. Viel Spaß beim lesen und nachbauen.
Was wird benötigt
- 8x Eachine RC832 Boscam Empfänger (48 Kanäle) RP-SMA
- 8x RP-SMA Antennen (Pagoda Eigenbau, Realacc Pagoda, Aomway)
- 8x BNC zu Chinch Adapter (alternativ Amazon)
- 1x LM2596 Spannungswandler 3A (alternativ Amazon)
- 1x KKmoon DVR Receiver 16 Kanäle, 8 Kanäle oder 4 Kanäle
- 3x Chinch Verlängerungskabel 5m (optional)
- 1x Kabel Spiralschlauch (optional)
- 1x Stativ (alternativ Banggood) (optional)
- 16x Rovaflex Softbinder (optional)
- 1x HDMI Recoder (optional)
In erster Linie habe ich den FPV Splitscreen aber für meine Kumpels von Infinity Spin, Egodrift und RAM Racer Lüneburg aufgebaut, da wir regelmäßig gemeinsam zu Events fahren.
Mein erster Gedanke war es, mehrere 7 bzw. 10 Zoll Bildschirme auf einer Platte nebeneinander zu montieren. Diesen Plan habe ich aufgrund der hohen Kosten allerdings schnell verworfen.
Erster Versuch – Analog
Als erstes habe ich mir einen analogen Video Quad Splitter gekauft. Leider war ich von der Qualität mehr als enttäuscht. Natürlich hatte ich nicht bedacht, dass man aus den 4 analogen Signalen wiederum ein analoges Signal erzeugt welches auf dem FullHD Fernseher hochskaliert wird.
Das Ergebnis sah wie folgt aus: Unscharf, verpixelt, schwarzweiß, verschoben und absolut nicht zu gebrauchen.

Zweiter Versuch – FullHD CCTV Recorder



Eigentlich war ich schon auf dem richtigen Weg mir einen Splitter aus der Überwachungstechnik zu besorgen. Durch einen Tipp und nahezu gleichzeitiger Google Recherche bin ich auf die günstigen CCTV DVR Receiver von KKmoon aufmerksam geworden.
Die Receiver gibt es mit bis zu 16 analogen Video-Eingängen.
Ich habe mich für die 8 Kanal Version entschieden, werde in Zukunft aber höchstwahrscheinlich auf 16 Kanäle umstellen. Dazu später mehr. Man kann mithilfe der Fernbedienung verschiedenen Splitscreen Layouts einstellen.



Den Receiver kann man natürlich auch als DVR benutzen. Gerade für die Rennleitung ist dieses Feature eine super Sache um eventuelle Unklarheiten wie ausgelassene Gates oder störende Videosender leichter zu identifizieren und im Zweifelsfall auch nachzuweisen.
Gesteuert wird der Receiver mit einer normalen USB Maus oder der beiliegenden Fernbedienung. Außerdem ist es möglich alle Kanäle per Netzwerk (oder einem Accesspoint) zu streamen. Dazu benötigt man auf dem Clients die App XMEye.
Die Video Empfänger

Ich habe mich für günstige Eachine RC832 Boscam Empfänger entschieden. Dieser Empfänger braucht ca. 200 mA bei 12 Volt Spannung und verfügt über 48 Kanäle (inklusive Low Raceband). Preis/Leistung ist bei diesem Gerät hervorragend.
Antennen


Da ich noch haufenweise Pagoda PCBs für den Antennenbau zuhause liegen hatte, habe ich mich natürlich für Pagoda Antennen entschieden. Auf dem FPV Race in Nördlingen habe ich erstaunlich klares und stabiles Bild der 25 mW Copter empfangen.
Norbert von Flyduino hatte mit seinen Stabantennen ein schlechteres Bild und hat sich über ein paar Pagodas von mir gefreut. 
Zubehör
Nachfolgend gehe ich auf das Zubehör ein, welches man für den FPV Splitscreen benötigt.
RCA BNC Adapter

Da der KKmoon BNC-Buchsen hat, benötigt man diese Adapter: BNC zu Chinch Adapter (alternativ Amazon). Sie werden durch drehen arretiert.
Chinch Verlängerungskabel

Damit ich den Empfänger etwas weiter entfernt vom Monitor stellen kann, habe ich mir mehrere 5 meter lange Chinch Kabel gekauft und in einen Spiralschlauch eingedreht.
Achtung, das eindrehen dauert Stunden und gute Nerven 
Spannungswandler




Für die Spannungsversorgung der Video Empfänger habe ich den LM2596 Spannungswandler 3A (alternativ Amazon) verwendet. Die Spannung kann mittels Stellrad eingestellt werden. Ein Display zeigt auf Wunsch die Eingangs und Ausgangsspannung an.
Stativ



Ein Hama Stativ von Amazon hält den Empfangskopf in geeigneter Höhe. Dieses Stativ hat einen Haken wo man Gewichte heran hängen kann, damit es im Wind nicht umkippt (so wie in Nördlingen).
PETG Druckteil


Natürlich habe ich mir für die einfache Montage ein Druckteil gezeichnet und aus schwarzem PETG gedruckt.
Hier kann es heruntergeladen werden.
Rovaflex Softbinder

Mit Rovaflex Softbinder habe ich alle Empfänger an dem Druckteil montiert. Die Empfänger liegen unten auf einer schmalen Kante des Druckteils auf und sitzen mit jeweils zwei Softbindern fest in Position.
Festplatte

Ich habe einen Receiver ohne Festplatte gekauft. Leider habe ich es nicht geschafft meine Festplatte an den Receiver anzuschließen. Ich habe die Festplatte als NTFS formatiert, sodass der KKmoon Receiver sie erkennt und auf das DVR Dateisystem formatieren kann. Wenn ihr also die Aufnahmefunktion des KKmoon benutzen möchtet und alle Kanäle einzeln aufnehmen möchtet, solltet ihr die Version mit eingebauter Festplatte verwenden. Ich werde zur Aufnahme nun einen HDMI Recorder verwenden um den gesamten FPV Splitscreen in einer Datei aufzunehmen (siehe weiter unten).
Wifi Accesspoint

Über den TP-Link N300 Access Point kann man ein eigenes WLAN Netz erstellen in dem man den Stream abrufen kann. Dazu benötigt man auf den Clients die App XMEye. Die Verzögerung ist allerdings sehr stark und die Qualität des Streams nicht gerade hoch. Deswegen ist dies für mich eher ein nettes Gimmick. Ein Rennen kann man damit nicht wirklich angenehm verfolgen.
HD DVR Aufnahme


Da ich die interne Festplatte nicht zum laufen bekommen habe und ich durch mein Connex System noch einen HDMI Recorder herumliegen hatte, bin ich auf die Idee gekommen diesen zu verwenden. Das Gerät schleift das Signal nahezu ohne Verzögerung durch und nimmt den gesamten HDMI Stream auf einer externen Festplatte oder USB Stick auf. Gerade für die Rennleitung auf einem FPV Event finde ich diese Aufnahmefunktion ideal.
FPV Splitscreen Sharing
Warum unnötig viel Geld ausgeben? Ich habe einen 5 Volt HDMI Splitter mit dem man das HDMI Signal vervielfältigen kann. Bring auf den nächsten Events einfach deinen TV mit und ein langes HDMI Kabel und du darfst dich an meinen Splitter anschließen, soweit noch ein Platz frei ist. Natürlich kannst du auch einen weiteren Splitter anschließen und das Signal weiter verbreiten.


Verbesserungen – FPV Splitscreen
Diversity

Die Eachine RC832 Boscam Empfänger verrichten zusammen mit den Pagodas einen wirklich guten Job. Beim Rennen in Nördlingen hatte ich eigentlich immer ein gutes Bild und nur wenig Aussetzer. Natürlich könnte man das ganze System noch verbessern, wenn man Diversity Empfänger benutzen würde. Dadurch könnte man zusätzlich 8 Patch Antennen anschließen um Verbindungsabbrüche zu vermeiden und die Reichweite zu erhöhen.
Leider sind die meisten Diversity Empfänger teuer und würden die Kosten für einen 8er FPV Splitscreen in die Höhe treiben. Meine Überlegung ist es nun, die Diversity Empfänger selber zu bauen und auf dieses Github Projekt zurückzugreifen. Dafür werde ich in Zukunft vielleicht ein PCB entwerfen.
Alternativ kann man das günstige Diversity Modul von Eachine verwenden, um in den Genuss von Diversity zu kommen. Dazu würde ich ein PCB erstellen, auf dem die Module einfach draufgesteckt werden.

Anti Blackscreen Mod
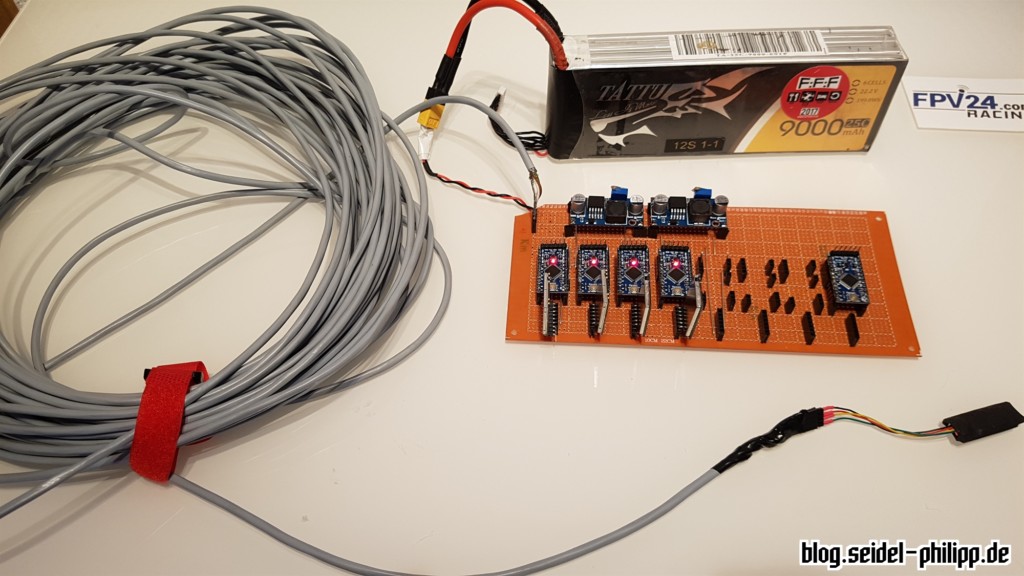
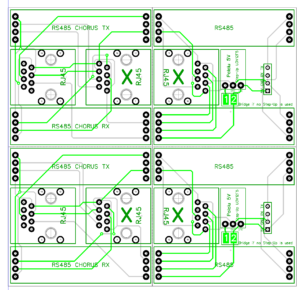
Ein großer Nachteil ist, dass der KKmoon Receiver bei schwachem Signal das Bild schwarz schaltet (sog. Bluescreen). Gerade im Flug führt dies zu Bildaussetzern und unsynchronität. Um dieses zu verhindern habe ich mir bereits Gedanken gemacht und werde ein eigenes PCB entwerfen auf dem 8 MinimOSDs verbaut sind. Das Videosignal wird durchgeschleift und minimal bearbeitet. Zum Beispiel kann in der Ecke jedes Videobilds der Kanal angezeigt werden oder beliebiger Text.
Ich werde das OSD-Board so entwerfen, dass ich vollen Zugriff auf die MinimOSDs habe und sie ggfs. mit externe Hardware ansteuern kann. Eine Idee ist es verschiedene Dinge interaktiv anzeigen zu lassen, wie zum Beispiel:
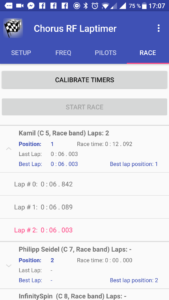
- live Rundenzeiten
- aktuelle Runde
- aktuelle Platzierung im Rennen
- …hast du noch eine Idee?
![😉]()
Natürlich bin ich dabei auf eine Anbindung an die gängigen Tracker angewiesen.
Track / Pilot Area Cams

Denken wir auch mal an die Zuschauer. In Nördlingen stand leider kein einziger Monitor für die Zuschauer bereit wo man das Rennen aus Pilotensicht hätte mitverfolgen können. Teilweise sind die Zuschauer in mein ohnehin schon überfülltes Zelt gekommen um auf meinem Splitscreen das Rennen zu verfolgen.
Deswegen habe ich die Idee, den Splitscreen um Track oder Piloten Cams zu erweitern und das Rennen noch spannender zu gestalten.
Leider habe ich mir „nur“ die 8 Kanal Version gekauft. Ich spiele mit dem Gedanken die 16 Kanal Version zu kaufen (oder einen zweiten 8er) und entweder den Track mit Kameras auszustatten, oder vor jedem Pilotensitz eine Kamera zu installieren, die dann auf dem FPV Splitscreen unter seinem FPV Bild zu sehen ist. So würde man auch noch live die Reaktionen der Piloten mitbekommen.
FAZIT


Ziel war es einen möglichst günstigen FPV Splitscreen zu bauen um FPV Rennen für Zuschauer interessant zu machen. Auf dem FPV Rennen in Nördlingen ist der Splitscreen extrem gut angekommen. Unsere beiden Event Sheltern waren immer voll mit Zuschauern und auch aus den umliegenden Zelten wurde das Rennen auf dem Splitscreen verfolgt.
Wenn du einen FPV Splitscreen gebaut hast würde ich mich freuen, wenn du mir Fotos zukommen lassen würdest, die ich hier im Blog veröffentlichen kann.
Credits: Samsung Screen Mockup Designed by Freepik
Der Beitrag FPV Splitscreen für Racing Events erschien zuerst auf Phils Blog.







































 ___________
___________  ✂ @aufmschlau.ch ___________ #teamblacksheep #aviation #drone #quadcopter #loop #fpvracing #droneracing #droneoftheday #dronemultimedia #buenosaires #droneloop #wing #helicopter #dronephotography #dronegear #droneporn #multirotor #loop #rc #quad #fromwhereidrone #dronespace #gopro #aufmschlauch #tbs #midair #drones #fpv #dronestagram #serioustoys
✂ @aufmschlau.ch ___________ #teamblacksheep #aviation #drone #quadcopter #loop #fpvracing #droneracing #droneoftheday #dronemultimedia #buenosaires #droneloop #wing #helicopter #dronephotography #dronegear #droneporn #multirotor #loop #rc #quad #fromwhereidrone #dronespace #gopro #aufmschlauch #tbs #midair #drones #fpv #dronestagram #serioustoys































































































 )
)







































